设置机器人仿真(Gazebo)。
目标: 使用Gazebo和ROS 2启动仿真。
教程级别: 高级
任务
1 启动模拟
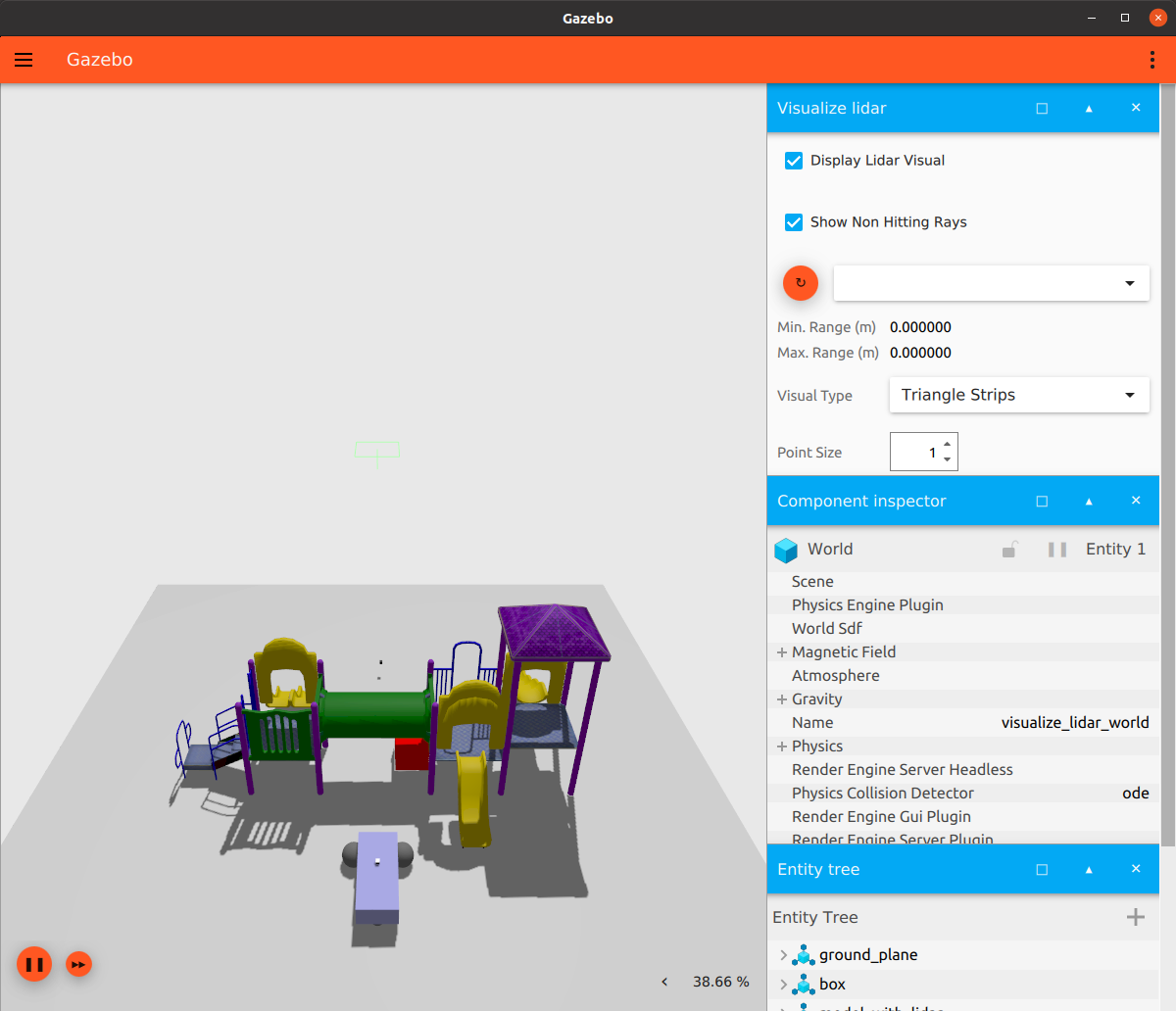
在这个演示中,您将在Gazebo中模拟一个简单的差动驱动机器人。您将使用Gazebo示例中定义的一个世界,名为 visualize_lidar.sdf。要运行此示例,请在终端中执行以下命令:
ign gazebo -v 4 -r visualize_lidar.sdf
当模拟正在运行时,您可以使用``ign``命令行工具检查Gazebo提供的主题:
ign topic -l
这将显示:
/clock
/gazebo/resource_paths
/gui/camera/pose
/gui/record_video/stats
/model/vehicle_blue/odometry
/model/vehicle_blue/tf
/stats
/world/visualize_lidar_world/clock
/world/visualize_lidar_world/dynamic_pose/info
/world/visualize_lidar_world/pose/info
/world/visualize_lidar_world/scene/deletion
/world/visualize_lidar_world/scene/info
/world/visualize_lidar_world/state
/world/visualize_lidar_world/stats
由于您尚未启动ROS 2节点,因此``ros2 topic list``命令的输出应该不包含任何机器人相关的主题:
ros2 topic list
这将显示:
/parameter_events
/rosout
2 配置ROS 2
为了能够将我们的仿真与ROS 2通信,您需要使用一个名为``ros_gz_bridge``的软件包。该软件包提供了一个网络桥接器,可以在ROS 2和Gazebo Transport之间交换消息。您可以通过输入以下命令来安装该软件包:
sudo apt-get install ros-humble-ros-ign-bridge
此时,您可以启动一个从ROS到Gazebo的桥接器。具体来说,您将为主题``/model/vehicle_blue/cmd_vel``创建一个桥接器:
source /opt/ros/humble/setup.bash
ros2 run ros_gz_bridge parameter_bridge /model/vehicle_blue/cmd_vel@geometry_msgs/msg/Twist]ignition.msgs.Twist
有关``ros_gz_bridge``的更多详细信息,请查看此`README <https://github.com/gazebosim/ros_gz/tree/ros2/ros_gz_bridge>`__。
一旦桥接程序运行,机器人就能够遵循您的电机命令。有两种选择:
使用``ros2 topic pub``向主题发送命令
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/Twist "linear: { x: 0.1 }"
``teleop_twist_keyboard``软件包。该节点从键盘接收按键,并将其发布为扭矩消息。您可以通过输入以下命令来安装它:
sudo apt-get install ros-humble-teleop-twist-keyboard
teleop_twist_keyboard``发布Twist消息的默认主题是/cmd_vel``,但您可以重新映射此主题以使用桥接中使用的主题:source /opt/ros/humble/setup.bash ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r /cmd_vel:=/model/vehicle_blue/cmd_vel将显示如下内容:
This node takes keypresses from the keyboard and publishes them as Twist messages. It works best with a US keyboard layout. --------------------------- Moving around: u i o j k l m , . For Holonomic mode (strafing), hold down the shift key: --------------------------- U I O J K L M < > t : up (+z) b : down (-z) anything else : stop q/z : increase/decrease max speeds by 10% w/x : increase/decrease only linear speed by 10% e/c : increase/decrease only angular speed by 10% CTRL-C to quit currently: speed 0.5 turn 1.0
3 在ROS 2中可视化激光雷达数据
差动驱动机器人配备了激光雷达。要将Gazebo生成的数据发送到ROS 2,您需要启动另一个桥接程序。在本例中,激光雷达的数据提供在Gazebo传输主题``/lidar2``中,您将在桥接程序中重新映射该主题。该主题将在主题``/lidar_scan``下可用:
source /opt/ros/humble/setup.bash
ros2 run ros_gz_bridge parameter_bridge /lidar2@sensor_msgs/msg/LaserScan[ignition.msgs.LaserScan --ros-args -r /lidar2:=/laser_scan
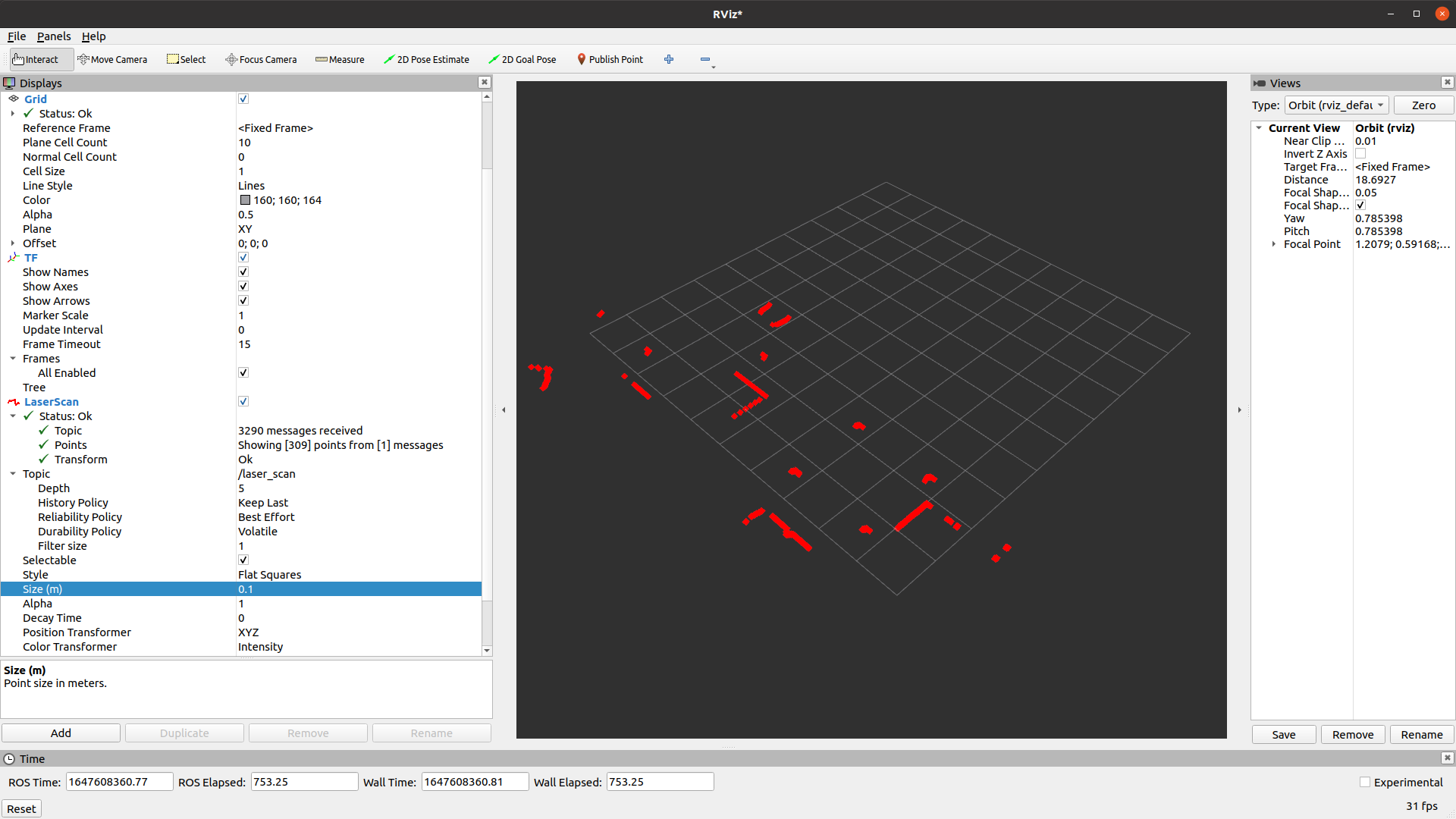
要在ROS 2中可视化来自激光雷达的数据,您可以使用Rviz2:
source /opt/ros/humble/setup.bash
rviz2
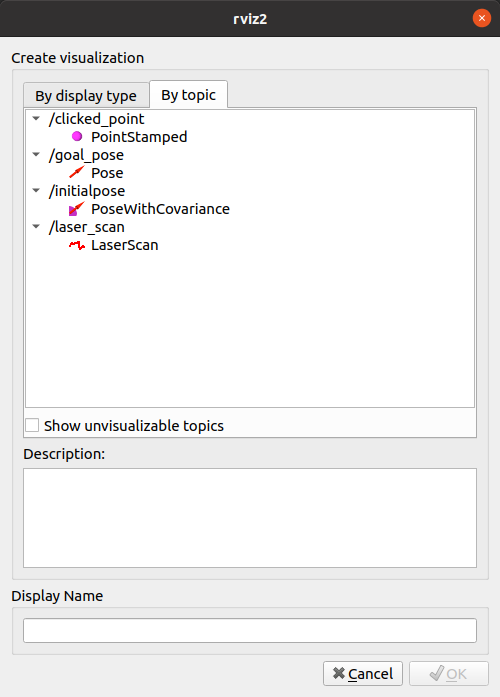
然后,您需要配置“fixed frame”:

然后点击“Add”按钮,添加一个显示以可视化激光雷达:
现在您应该在Rviz2中看到来自激光雷达的数据: