调试
**目标:**学习如何使用系统化方法来调试与tf2相关的问题。
教程级别: 中级
时间: 10分钟
调试示例
1 设置并启动示例
在本教程中,我们将设置一个演示应用程序,该应用程序存在一些问题。本教程的目标是应用系统化的方法来发现和解决这些问题。首先,让我们创建源文件。
进入我们在 tf2 tutorials 中创建的 learning_tf2_cpp 包。在 src 目录中复制源文件 turtle_tf2_listener.cpp,并将其重命名为 turtle_tf2_listener_debug.cpp。
使用您首选的文本编辑器打开该文件,并将第67行更改为
std::string toFrameRel = "turtle2";
更改为
std::string toFrameRel = "turtle3";
并将第75-79行中的 lookupTransform() 调用更改为
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
tf2::TimePointZero);
} catch (tf2::TransformException & ex) {
更改为
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now());
} catch (tf2::TransformException & ex) {
并保存文件更改。为了运行这个演示,我们需要在 learning_tf2_cpp 包的 launch 子目录中创建一个名为 start_tf2_debug_demo.launch.py 的启动文件:
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
DeclareLaunchArgument(
'target_frame', default_value='turtle1',
description='Target frame name.'
),
Node(
package='turtlesim',
executable='turtlesim_node',
name='sim',
output='screen'
),
Node(
package='learning_tf2_cpp',
executable='turtle_tf2_broadcaster',
name='broadcaster1',
parameters=[
{'turtlename': 'turtle1'}
]
),
Node(
package='learning_tf2_cpp',
executable='turtle_tf2_broadcaster',
name='broadcaster2',
parameters=[
{'turtlename': 'turtle2'}
]
),
Node(
package='learning_tf2_cpp',
executable='turtle_tf2_listener_debug',
name='listener_debug',
parameters=[
{'target_frame': LaunchConfiguration('target_frame')}
]
),
])
不要忘记将``turtle_tf2_listener_debug``可执行文件添加到``CMakeLists.txt``中并构建软件包。
现在让我们运行它看看会发生什么:
ros2 launch learning_tf2_cpp start_tf2_debug_demo.launch.py
现在你会看到turtlesim启动了。同时,如果你在另一个终端窗口中运行``turtle_teleop_key``,你可以使用箭头键来控制``turtle1``移动。
ros2 run turtlesim turtle_teleop_key
你还会注意到在左下角有一只第二只海龟。如果演示工作正常,这只第二只海龟应该会跟随你用箭头键控制的海龟移动。然而,事实并非如此,因为我们首先需要解决一些问题。你应该注意到以下消息:
[turtle_tf2_listener_debug-4] [INFO] [1630223454.942322623] [listener_debug]: Could not
transform turtle3 to turtle1: "turtle3" passed to lookupTransform argument target_frame
does not exist
2 寻找tf2请求
首先,我们需要弄清楚我们具体要求tf2做什么。因此,我们进入正在使用tf2的代码部分。打开``src/turtle_tf2_listener_debug.cpp``文件,并查看第67行:
std::string to_frame_rel = "turtle3";
并且在第75至79行中:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now());
} catch (tf2::TransformException & ex) {
在这里,我们实际向tf2发出请求。这三个参数直接告诉我们向tf2询问的内容:在时间``now``下从坐标系``turtle3``到坐标系``turtle1``的变换。
现在,让我们看看为什么这个向tf2的请求失败了。
3 检查坐标系
首先,为了确定tf2是否知道我们在``turtle3``和``turtle1``之间的变换,我们将使用``tf2_echo``工具。
ros2 run tf2_ros tf2_echo turtle3 turtle1
输出告诉我们``turtle3``坐标系不存在:
[INFO] [1630223557.477636052] [tf2_echo]: Waiting for transform turtle3 -> turtle1:
Invalid frame ID "turtle3" passed to canTransform argument target_frame - frame does
not exist
那么存在哪些帧?如果您想以图形方式查看,请使用“view_frames”工具。
ros2 run tf2_tools view_frames
打开生成的“frames.pdf”文件,查看以下输出:
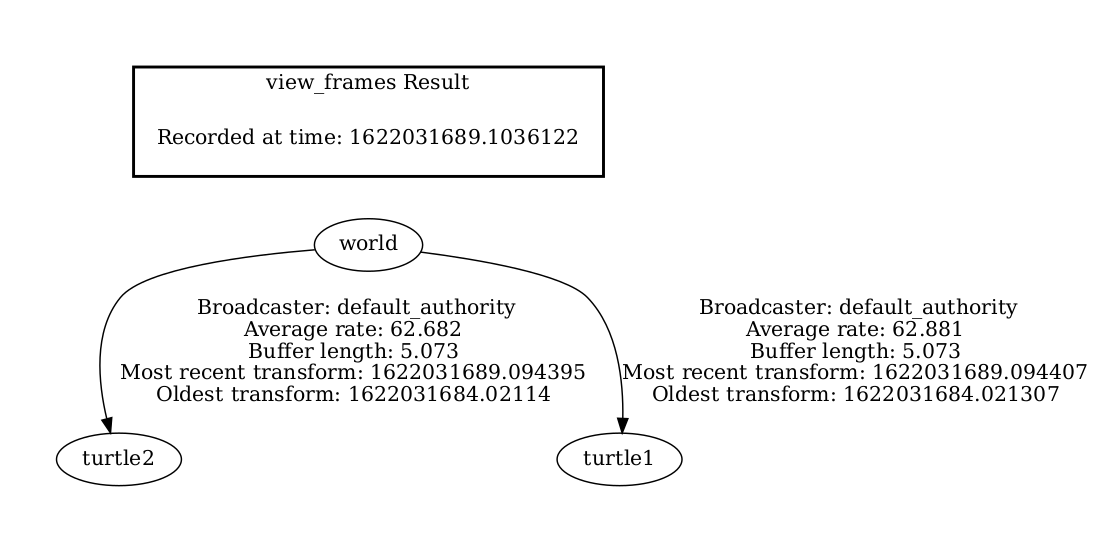
显然问题是我们正在请求从“turtle3”帧到“turtle2”帧的变换,但“turtle3”帧不存在。要修复此错误,请在第67行将“turtle3”替换为“turtle2”。
现在停止正在运行的演示程序,进行构建,然后再次运行:
ros2 launch turtle_tf2 start_debug_demo.launch.py
然后立即遇到下一个问题:
[turtle_tf2_listener_debug-4] [INFO] [1630223704.617382464] [listener_debug]: Could not
transform turtle2 to turtle1: Lookup would require extrapolation into the future. Requested
time 1630223704.617054 but the latest data is at time 1630223704.616726, when looking up
transform from frame [turtle1] to frame [turtle2]
4 检查时间戳
现在我们已经解决了帧名称的问题,是时候看一下时间戳了。记住,我们要在当前时间(即“now”)获取“turtle2”和“turtle1”之间的变换。要获取有关时间统计的信息,请调用相应帧的“tf2_monitor”。
ros2 run tf2_ros tf2_monitor turtle2 turtle1
结果应该是这样的:
RESULTS: for turtle2 to turtle1
Chain is: turtle1
Net delay avg = 0.00287347: max = 0.0167241
Frames:
Frame: turtle1, published by <no authority available>, Average Delay: 0.000295833, Max Delay: 0.000755072
All Broadcasters:
Node: <no authority available> 125.246 Hz, Average Delay: 0.000290237 Max Delay: 0.000786781
这里的关键部分是从“turtle2”到“turtle1”的延迟。输出显示平均延迟约为3毫秒。这意味着tf2只能在经过3毫秒后才能在这些海龟之间进行变换。因此,如果我们询问tf2在3毫秒前而不是“now”时的变换,有时tf2能给出答案。让我们通过将75-79行更改为以下内容来快速测试:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now() - rclcpp::Duration::from_seconds(0.1));
} catch (tf2::TransformException & ex) {
在新代码中,我们要求在100毫秒之前的时间获取这些海龟之间的变换。通常使用更长的时间段,只是为了确保变换会到达。停止演示,构建和运行:
ros2 launch turtle_tf2 start_debug_demo.launch.py
你应该最终看到海龟在移动!
我们刚才进行的最后修复不是你想要做的,只是为了确保这是我们的问题。真正的修复将如下所示:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
tf2::TimePointZero);
} catch (tf2::TransformException & ex) {
或者像这样:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
tf2::TimePoint());
} catch (tf2::TransformException & ex) {
你可以在:doc:`使用时间<./Learning-About-Tf2-And-Time-Cpp>`教程中了解更多关于超时的信息,并按照以下方式使用它们:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now(),
rclcpp::Duration::from_seconds(0.05));
} catch (tf2::TransformException & ex) {