设置URDF
在本指南中,我们将为一个简单的差动驱动机器人创建统一机器人描述格式(Unified Robot Description Format,URDF)文件,以便让您亲自体验使用URDF的工作。我们还将设置机器人状态发布器并在RVIZ中可视化我们的模型。最后,我们将向机器人的URDF添加一些运动学属性,以便为仿真目的做准备。这些步骤是为了代表您的机器人的所有传感器、硬件和机器人变换,以供导航使用。
参见
本教程中的完整源代码可以在 navigation2_tutorials 存储库的 sam_bot_description 包中找到。请注意,该存储库包含完成本指南中所有教程后的完整代码。
URDF和机器人状态发布器
如前面的教程中所讨论的,Navigation2的一个要求是从 base_link 到各种传感器和参考坐标系的变换。这个变换树可以是一个简单的树,只有一个链接从 base_link 到 laser_link,也可以是一个由位于不同位置的多个传感器组成的树,每个传感器都有自己的坐标系。创建多个发布者来处理所有这些坐标系的变换可能会变得繁琐。因此,我们将使用机器人状态发布器包来发布我们的变换。
机器人状态发布器是ROS 2的一个包,它与tf2包交互,发布可以直接从机器人的几何和结构中推断出的所有必要转换。我们需要提供正确的URDF给它,它将自动处理转换的发布。这对于复杂的转换非常有用,但对于较简单的转换树也是推荐的。
统一机器人描述格式(Unified Robot Description Format,URDF)是一个表示机器人模型的XML文件。在本教程中,它主要用于构建与机器人几何相关的变换树,但它还有其他用途。一个例子是如何在RVIZ中可视化机器人模型,RVIZ是ROS的一个三维可视化工具,通过定义诸如材料和网格等可视化组件来实现。另一个例子是URDF如何用于定义机器人的物理属性。这些属性然后被物理模拟器(如Gazebo)用于模拟机器人在环境中的交互。
URDF的另一个重要特性是它还支持Xacro(XML宏),帮助您创建一个更短、更易读的XML来定义复杂的机器人。我们可以使用这些宏来消除URDF中重复的XML块的需要。Xacro还可以用于定义可以在整个URDF中重用的配置常量。
参见
如果您想了解更多关于URDF和机器人状态发布器的信息,我们建议您查看官方的 URDF文档 和 机器人状态发布器文档。
设置环境
在本指南中,我们假设您已经熟悉ROS 2以及如何设置开发环境,因此我们将快速浏览本节中的步骤。
让我们从安装一些在本教程中将使用的额外ROS 2包开始。
sudo apt install ros-<ros2-distro>-joint-state-publisher-gui
sudo apt install ros-<ros2-distro>-xacro
接下来,创建一个用于您的项目的目录,初始化一个ROS 2工作空间并为您的机器人命名。我们将称之为 sam_bot。
ros2 pkg create --build-type ament_cmake sam_bot_description
编写URDF
参见
本节旨在为您提供一个适用于初学者的URDF构建机器人的简介。如果您想要了解更多关于URDF和XAcro的信息,建议您查阅官方的`URDF文档 <http://wiki.ros.org/urdf>`__
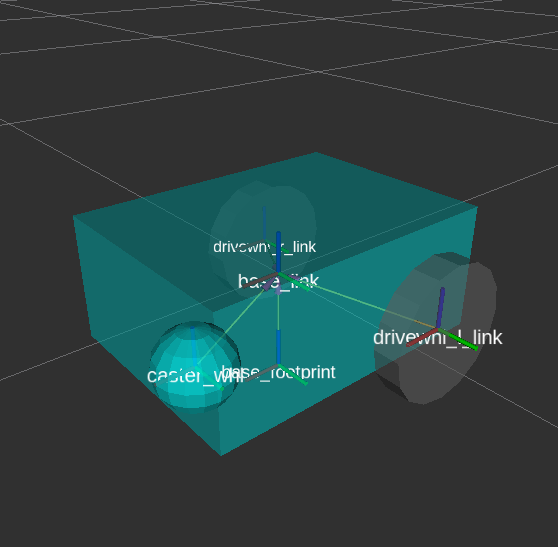
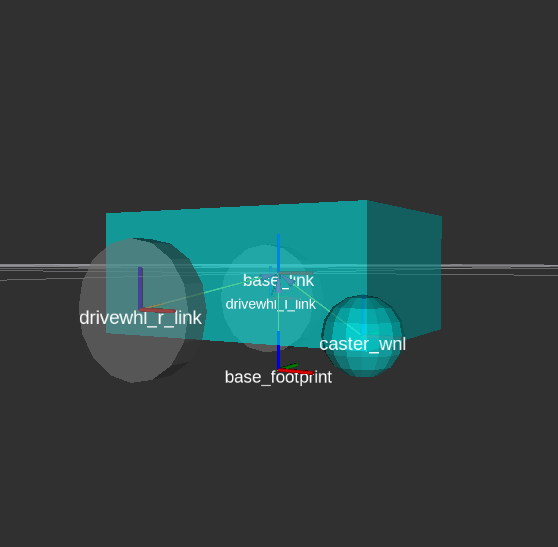
既然我们已经设置好了项目工作空间,让我们直接开始编写URDF。下面是我们将要尝试构建的机器人的图像。
首先,在``src/description``目录下创建一个名为``sam_bot_description.urdf``的文件,并将以下内容输入作为文件的初始内容。
1<?xml version="1.0"?>
2<robot name="sam_bot" xmlns:xacro="http://ros.org/wiki/xacro">
3
4
5
6</robot>
注解
下面的代码片段应该放置在``<robot>``标签之间。我们建议按照本教程介绍的顺序添加它们。我们还包含了一些行号,以便大致指导您在何处输入代码。实际文件中的行号可能与本指南中出现的行号不同,这取决于您使用空格的方式。还请注意,行号假设您按照指南中的代码顺序输入。
接下来,让我们使用XAcro属性定义一些常量,这些常量将在整个URDF中重复使用。
4 <!-- Define robot constants -->
5 <xacro:property name="base_width" value="0.31"/>
6 <xacro:property name="base_length" value="0.42"/>
7 <xacro:property name="base_height" value="0.18"/>
8
9 <xacro:property name="wheel_radius" value="0.10"/>
10 <xacro:property name="wheel_width" value="0.04"/>
11 <xacro:property name="wheel_ygap" value="0.025"/>
12 <xacro:property name="wheel_zoff" value="0.05"/>
13 <xacro:property name="wheel_xoff" value="0.12"/>
14
15 <xacro:property name="caster_xoff" value="0.14"/>
以下是对这些属性在我们的URDF中代表的简要讨论。``base_*``属性都定义了机器人主底盘的尺寸。``wheel_radius``和``wheel_width``定义了机器人两个后轮的形状。``wheel_ygap``调整了轮子与底盘之间沿y轴的间隙,而``wheel_zoff``和``wheel_xoff``则适当地将后轮定位于z轴和x轴上。最后,``caster_xoff``将前导轮定位于x轴上。
然后,让我们定义我们的``base_link`` - 这个链接将是一个大箱子,将作为我们机器人的主要底盘。在URDF中,``link``元素描述了机器人的刚性部件或组件。机器人状态发布器利用这些定义来确定每个链接的坐标系,并发布它们之间的变换。
我们还将定义一些链接的视觉属性,这些属性可以被诸如Gazebo和Rviz之类的工具用来显示机器人的三维模型。其中包括``<geometry>``描述链接的形状和``<material>``描述其颜色。
对于下面的代码块,我们使用``${property}``语法从之前定义的机器人常量部分访问``base``属性。此外,我们还将主底盘的材料颜色设置为``Cyan``。请注意,我们将这些参数设置在``<visual>``标签下,因此它们只会作为可视参数应用,不会影响任何碰撞或物理属性。
17 <!-- Robot Base -->
18 <link name="base_link">
19 <visual>
20 <geometry>
21 <box size="${base_length} ${base_width} ${base_height}"/>
22 </geometry>
23 <material name="Cyan">
24 <color rgba="0 1.0 1.0 1.0"/>
25 </material>
26 </visual>
27 </link>
接下来,让我们定义一个``base_footprint``链接。``base_footprint``链接是一个虚拟(非物理)链接,它没有尺寸或碰撞区域。其主要目的是使各种软件包确定机器人在地面上投影时的中心。例如,Navigation2使用该链接确定其避障算法中使用的圆形足迹的中心。同样,我们设置这个链接没有尺寸,并指定机器人在投影到地平面时的中心位置。
在定义了我们的base_link之后,我们添加一个关节将其连接到``base_link``。在URDF中,``joint``元素描述了坐标系之间的运动学和动力学属性。对于这种情况,我们将定义一个``fixed``关节,并根据上面的描述设置适当的偏移量,以将``base_footprint``链接放置在正确的位置上。请记住,我们希望在从主底盘的中心投影到地平面时,将base_footprint设置为位于地平面上,因此我们将``wheel_radius``和``wheel_zoff``的和作为沿z轴的适当位置。
29 <!-- Robot Footprint -->
30 <link name="base_footprint"/>
31
32 <joint name="base_joint" type="fixed">
33 <parent link="base_link"/>
34 <child link="base_footprint"/>
35 <origin xyz="0.0 0.0 ${-(wheel_radius+wheel_zoff)}" rpy="0 0 0"/>
36 </joint>
现在,我们将向机器人添加两个大型驱动轮。为了使我们的代码更清晰,避免重复,我们将使用宏来定义一个将以不同参数重复的代码块。我们的宏有3个参数:``prefix``仅为我们的链接和关节名称添加前缀,``x_reflect``和``y_reflect``允许我们根据x轴和y轴翻转轮子的位置。在这个宏中,我们还可以定义单个轮子的视觉属性。最后,我们还将定义一个``continuous``关节,允许我们的轮子在一个轴周围自
在此代码块的末尾,我们将使用刚刚通过``xacro:wheel``标签创建的宏实例化两个轮子。请注意,我们还定义了参数,使得我们的机器人后部两侧都有一个轮子。
38 <!-- Wheels -->
39 <xacro:macro name="wheel" params="prefix x_reflect y_reflect">
40 <link name="${prefix}_link">
41 <visual>
42 <origin xyz="0 0 0" rpy="${pi/2} 0 0"/>
43 <geometry>
44 <cylinder radius="${wheel_radius}" length="${wheel_width}"/>
45 </geometry>
46 <material name="Gray">
47 <color rgba="0.5 0.5 0.5 1.0"/>
48 </material>
49 </visual>
50 </link>
51
52 <joint name="${prefix}_joint" type="continuous">
53 <parent link="base_link"/>
54 <child link="${prefix}_link"/>
55 <origin xyz="${x_reflect*wheel_xoff} ${y_reflect*(base_width/2+wheel_ygap)} ${-wheel_zoff}" rpy="0 0 0"/>
56 <axis xyz="0 1 0"/>
57 </joint>
58 </xacro:macro>
59
60 <xacro:wheel prefix="drivewhl_l" x_reflect="-1" y_reflect="1" />
61 <xacro:wheel prefix="drivewhl_r" x_reflect="-1" y_reflect="-1" />
接下来,我们将在机器人的前部添加一个万向轮。为了简单起见,我们将将这个轮子建模为一个球体。同样,我们定义轮子的几何形状、材料和连接它到``base_link``的关节的位置。
63 <!-- Caster Wheel -->
64 <link name="front_caster">
65 <visual>
66 <geometry>
67 <sphere radius="${(wheel_radius+wheel_zoff-(base_height/2))}"/>
68 </geometry>
69 <material name="Cyan">
70 <color rgba="0 1.0 1.0 1.0"/>
71 </material>
72 </visual>
73 </link>
74
75 <joint name="caster_joint" type="fixed">
76 <parent link="base_link"/>
77 <child link="front_caster"/>
78 <origin xyz="${caster_xoff} 0.0 ${-(base_height/2)}" rpy="0 0 0"/>
79 </joint>
到此为止!我们已经为一个简单的差动驱动机器人构建了一个URDF。在下一节中,我们将重点讨论构建包含我们的URDF、启动机器人状态发布器并在RVIz中可视化机器人的ROS包。
构建和启动
参见
本教程中的启动文件是从官方的“ROS 2 URDF教程”(https://github.com/ros/urdf_tutorial/tree/ros2)中改编的。
让我们从添加一些依赖项开始,这些依赖项在构建该项目后将会被使用。打开项目目录的根目录,并将以下内容添加到您的``package.xml``文件中(最好是在``<buildtool_depend>``标签之后)
<exec_depend>joint_state_publisher</exec_depend>
<exec_depend>joint_state_publisher_gui</exec_depend>
<exec_depend>robot_state_publisher</exec_depend>
<exec_depend>rviz</exec_depend>
<exec_depend>xacro</exec_depend>
接下来,让我们创建启动文件。ROS 2使用启动文件来启动我们包中所需的节点。从项目的根目录中创建一个名为“launch”的目录,并在其中创建一个名为“display.launch.py”的文件。下面的启动文件在ROS 2中启动一个机器人发布器节点,该节点使用我们的URDF发布机器人的变换。此外,启动文件还会自动启动RVIZ,这样我们就可以根据URDF定义可视化我们的机器人。将下面的代码段复制粘贴到“display.launch.py”文件中。
import launch
from launch.substitutions import Command, LaunchConfiguration
import launch_ros
import os
def generate_launch_description():
pkg_share = launch_ros.substitutions.FindPackageShare(package='sam_bot_description').find('sam_bot_description')
default_model_path = os.path.join(pkg_share, 'src/description/sam_bot_description.urdf')
default_rviz_config_path = os.path.join(pkg_share, 'rviz/urdf_config.rviz')
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': Command(['xacro ', LaunchConfiguration('model')])}]
)
joint_state_publisher_node = launch_ros.actions.Node(
package='joint_state_publisher',
executable='joint_state_publisher',
name='joint_state_publisher',
condition=launch.conditions.UnlessCondition(LaunchConfiguration('gui'))
)
joint_state_publisher_gui_node = launch_ros.actions.Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
name='joint_state_publisher_gui',
condition=launch.conditions.IfCondition(LaunchConfiguration('gui'))
)
rviz_node = launch_ros.actions.Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', LaunchConfiguration('rvizconfig')],
)
return launch.LaunchDescription([
launch.actions.DeclareLaunchArgument(name='gui', default_value='True',
description='Flag to enable joint_state_publisher_gui'),
launch.actions.DeclareLaunchArgument(name='model', default_value=default_model_path,
description='Absolute path to robot urdf file'),
launch.actions.DeclareLaunchArgument(name='rvizconfig', default_value=default_rviz_config_path,
description='Absolute path to rviz config file'),
joint_state_publisher_node,
joint_state_publisher_gui_node,
robot_state_publisher_node,
rviz_node
])
参见
有关ROS 2中的启动系统的更多信息,请参阅官方的`ROS 2启动系统文档<https://docs.ros.org/en/rolling/Tutorials/Launch-system.html>`__
为了在可视化过程中保持简单,我们提供了一个RVIz配置文件,该文件在我们启动包时将被加载。该配置文件使用适当的设置初始化了RVIz,因此一旦启动,您就可以立即查看机器人。在项目的根目录下创建一个名为“rviz”的目录,并在其中创建一个名为“urdf_config.rviz”的文件。将下面的内容放入“urdf_config.rviz”文件中。
Panels:
- Class: rviz_common/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /RobotModel1/Links1
- /TF1
Splitter Ratio: 0.5
Tree Height: 557
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Name: Grid
- Alpha: 0.6
Class: rviz_default_plugins/RobotModel
Description Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /robot_description
Enabled: true
Name: RobotModel
Visual Enabled: true
- Class: rviz_default_plugins/TF
Enabled: true
Name: TF
Marker Scale: 0.3
Show Arrows: true
Show Axes: true
Show Names: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: base_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/Interact
Hide Inactive Objects: true
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Class: rviz_default_plugins/Orbit
Name: Current View
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Saved: ~
最后,让我们修改项目根目录下的``CMakeLists.txt``文件,以包含我们在软件包安装过程中刚刚创建的文件。将以下代码段添加到``CMakeLists.txt``文件中,最好是在``if(BUILD_TESTING)``行之前:
install(
DIRECTORY src launch rviz
DESTINATION share/${PROJECT_NAME}
)
现在我们可以使用colcon构建项目了。进入项目根目录并执行以下命令。
colcon build
. install/setup.bash
成功构建后,执行以下命令安装ROS 2软件包并启动我们的项目。
ros2 launch sam_bot_description display.launch.py
ROS 2现在应该启动了一个机器人发布器节点,并使用我们的URDF启动了RVIZ。我们将在下一节中使用RVIZ查看我们的机器人。
使用RVIZ进行可视化
RVIZ是一种机器人可视化工具,可以使用URDF查看机器人的3D模型。在上一节中使用的命令成功启动后,RVIZ现在应该在屏幕上可见,并且应该看起来像下面的图像。您可能需要移动和操作视图,以便更好地查看机器人。
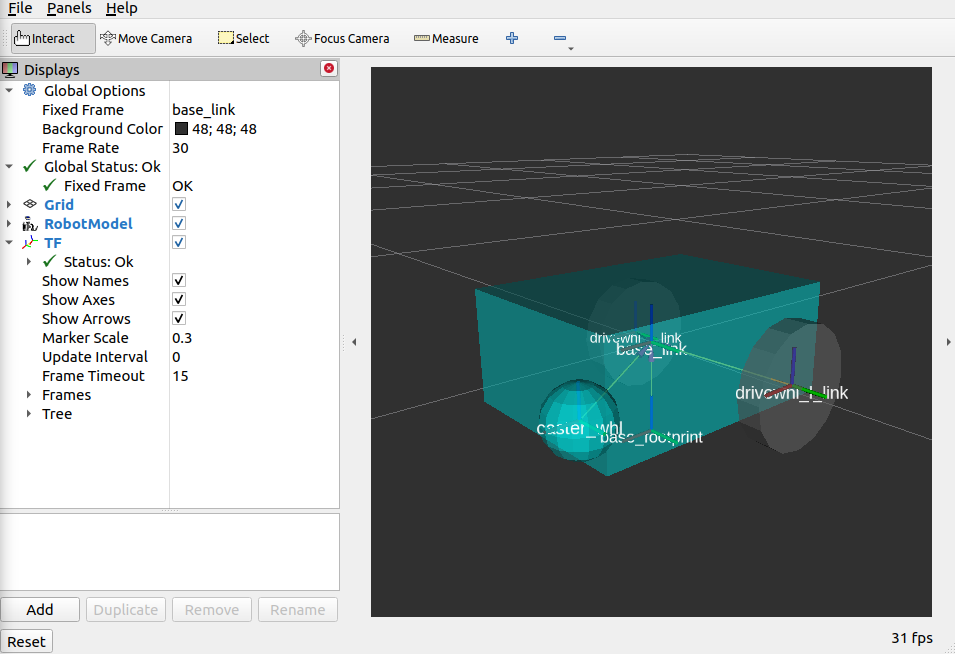
正如您所见,我们成功创建了一个简单的差动驱动机器人并在RVIz中可视化它。在RVIz中可视化机器人并非必需,但这是一个很好的步骤,可以验证您是否正确定义了URDF。这有助于确保机器人状态发布器发布了正确的变换。
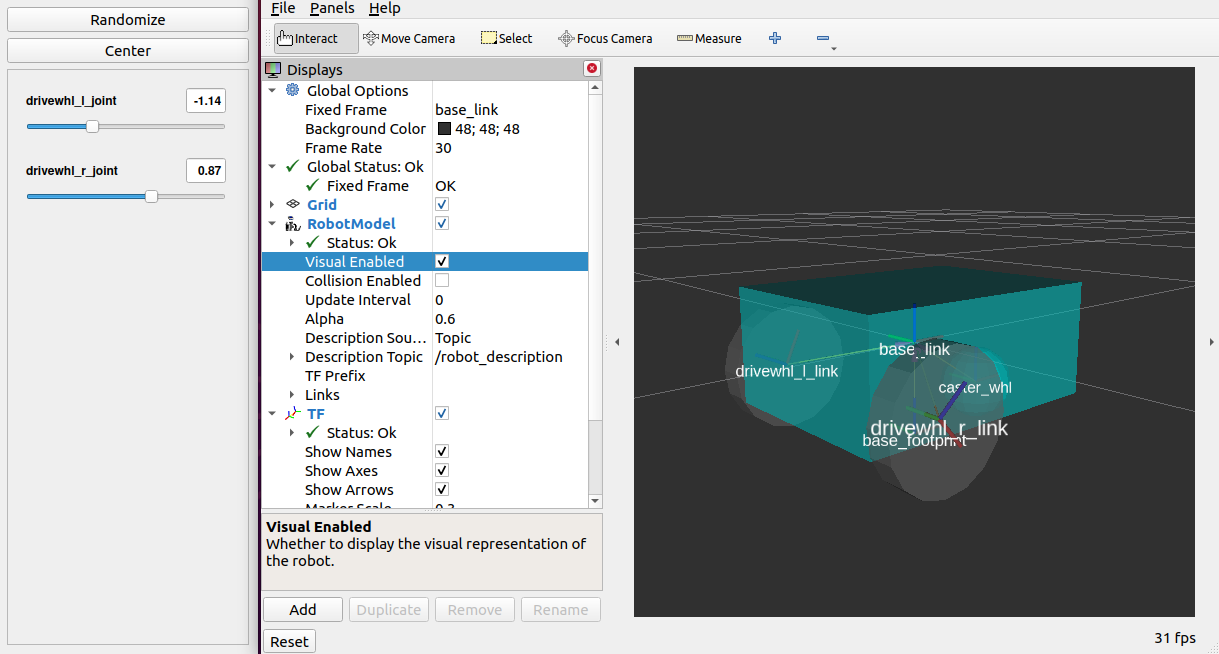
你可能已经注意到另一个窗口被打开了 - 这是一个用于关节状态发布的图形用户界面(GUI)。关节状态发布器是另一个 ROS 2 包,用于发布非固定关节的状态。你可以通过这个小型 GUI 操作该发布器,关节的新姿态将在 RVIz 中得到反映。滑动任一两个轮子的滑块将会旋转这些关节。当你在关节状态发布器的 GUI 中滑动滑块时,你可以通过观察 RVIZ 来看到这一过程。
注解
对于Nav2,我们不会与此软件包进行太多的交互,但如果您想了解更多关于关节状态发布器的信息,请随时查看官方的“关节状态发布器文档<http://wiki.ros.org/joint_state_publisher>`_”。
此时,你可能已经决定停止本教程,因为我们已经实现了创建一个简单差动驱动机器人的目标。机器人状态发布器现在正在发布从 URDF 中导出的变换。其他软件包(例如Nav2)现在可以使用这些变换来获取有关机器人形状和结构的信息。然而,为了在仿真中正确使用这个 URDF,我们需要物理属性,以便机器人对物理环境作出反应,就像真实机器人一样。可视化字段仅用于可视化,而不是用于碰撞,所以你的机器人会直接穿过障碍物。我们将在下一节中介绍如何在我们的 URDF 中添加这些属性。
添加物理属性
作为本指南的额外部分,我们将修改当前的 URDF,以包含机器人的一些运动学属性。这些信息可以被物理仿真器(如Gazebo)用来建模和模拟机器人在虚拟环境中的行为。
让我们首先定义包含我们项目中使用的几何基元的惯性属性的宏。将下面的代码段放置在URDF中常量部分之后:
17 <!-- Define intertial property macros -->
18 <xacro:macro name="box_inertia" params="m w h d">
19 <inertial>
20 <origin xyz="0 0 0" rpy="${pi/2} 0 ${pi/2}"/>
21 <mass value="${m}"/>
22 <inertia ixx="${(m/12) * (h*h + d*d)}" ixy="0.0" ixz="0.0" iyy="${(m/12) * (w*w + d*d)}" iyz="0.0" izz="${(m/12) * (w*w + h*h)}"/>
23 </inertial>
24 </xacro:macro>
25
26 <xacro:macro name="cylinder_inertia" params="m r h">
27 <inertial>
28 <origin xyz="0 0 0" rpy="${pi/2} 0 0" />
29 <mass value="${m}"/>
30 <inertia ixx="${(m/12) * (3*r*r + h*h)}" ixy = "0" ixz = "0" iyy="${(m/12) * (3*r*r + h*h)}" iyz = "0" izz="${(m/2) * (r*r)}"/>
31 </inertial>
32 </xacro:macro>
33
34 <xacro:macro name="sphere_inertia" params="m r">
35 <inertial>
36 <mass value="${m}"/>
37 <inertia ixx="${(2/5) * m * (r*r)}" ixy="0.0" ixz="0.0" iyy="${(2/5) * m * (r*r)}" iyz="0.0" izz="${(2/5) * m * (r*r)}"/>
38 </inertial>
39 </xacro:macro>
让我们从使用 <collision> 标签为``base_link``添加碰撞区域开始。我们还将使用之前定义的 box_inertia 宏来为``base_link``添加一些惯性属性。在 URDF 的``<link name="base_link">``标签中包含以下代码片段。
52 <collision>
53 <geometry>
54 <box size="${base_length} ${base_width} ${base_height}"/>
55 </geometry>
56 </collision>
57
58 <xacro:box_inertia m="15" w="${base_width}" d="${base_length}" h="${base_height}"/>
接下来,让我们为我们的轮子宏做同样的操作。将以下代码段包含在URDF中我们轮子宏的 <link name="${prefix}_link"> 标签内。
83 <collision>
84 <origin xyz="0 0 0" rpy="${pi/2} 0 0"/>
85 <geometry>
86 <cylinder radius="${wheel_radius}" length="${wheel_width}"/>
87 </geometry>
88 </collision>
89
90 <xacro:cylinder_inertia m="0.5" r="${wheel_radius}" h="${wheel_width}"/>
最后,让我们为球形齿轮加入类似的属性。在 URDF 的齿轮``<link name="front_caster">``标签中包含以下内容。
114 <collision>
115 <origin xyz="0 0 0" rpy="0 0 0"/>
116 <geometry>
117 <sphere radius="${(wheel_radius+wheel_zoff-(base_height/2))}"/>
118 </geometry>
119 </collision>
120
121 <xacro:sphere_inertia m="0.5" r="${(wheel_radius+wheel_zoff-(base_height/2))}"/>
注解
由于``base_footprint``是一个虚拟且非物理的链接,我们没有为其添加任何惯性或碰撞属性。
构建你的项目,然后使用前一节中的相同命令启动 RViz。
colcon build
. install/setup.bash
ros2 launch sam_bot_description display.launch.py
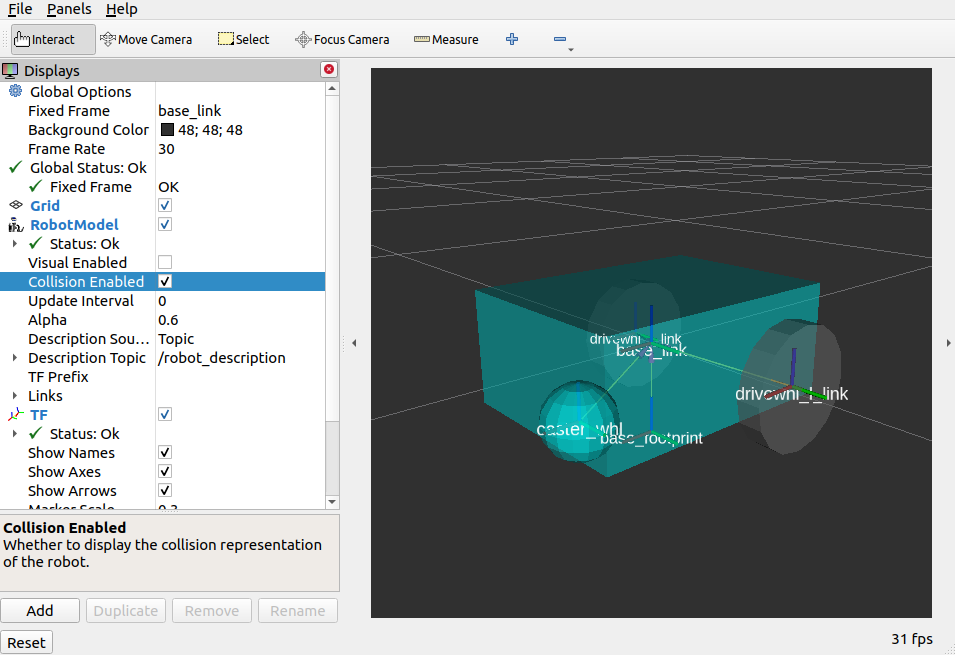
您可以通过在左侧窗格的“RobotModel”下启用“Collision Enabled”(如果您还关闭“Visual Enabled”可能更容易观察)来验证是否正确设置了碰撞区域。对于本教程,我们定义了一个与我们的视觉属性类似的碰撞区域。请注意,这并不总是这样,因为您可以根据机器人的外观选择更简单的碰撞区域。
目前为止,我们必须在这里停下,因为我们需要设置更多的组件才能开始在 Gazebo 中实际模拟我们的机器人。在这些设置指南的过程中,我们将回到这个项目,并最终在模拟部分看到我们的机器人在虚拟环境中移动。这项工作缺少的主要组件是用于模拟机器人控
结论
到此为止。在本教程中,您已成功为一个简单的差动驱动机器人创建了一个URDF。您还设置了一个ROS 2项目,启动了一个机器人发布节点,该节点使用您的URDF来发布机器人的变换。我们还使用RViz来可视化我们的机器人,以验证我们的URDF是否正确。最后,我们还向我们的URDF中添加了一些物理属性,以便为仿真做好准备。
请随意将本教程用作您自己机器人的模板。请记住,您的主要目标是从base_link到sensor_frames发布正确的变换。一旦这些设置好了,您就可以继续使用我们的其他设置指南。